In geometry, a radiodrome is the pursuit curve followed by a point that is pursuing another linearly-moving point. The term is derived from the Latin word radius (Eng. ray; spoke) and the Greek word dromos (Eng. running; racetrack), for there is a radial component in its kinematic analysis. The classic (and best-known) form of a radiodrome is known as the "dog curve"; this is the path a dog follows when it swims across a stream with a current after something it has spotted on the other side. Because the dog drifts with the current, it will have to change its heading; it will also have to swim further than if it had taken the optimal heading. This case was described by Pierre Bouguer in 1732.
A radiodrome may alternatively be described as the path a dog follows when chasing a hare, assuming that the hare runs in a straight line at a constant velocity.
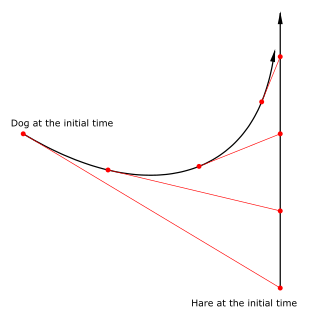
The path of a dog chasing a hare running along a vertical straight line at a constant speed. The dog runs towards the momentary position of the hare, and will be changing his heading continuously.
Mathematical analysis
Introduce a coordinate system with origin at the position of the dog at time zero and with y-axis in the direction the hare is running with the constant speed Vt. The position of the hare at time zero is (Ax, Ay) with Ax > 0 and at time t it is
(1)
The dog runs with the constant speed Vd towards the instantaneous position of the hare.
The differential equation corresponding to the movement of the dog, (x(t), y(t)), is consequently
(2)
(3)
It is possible to obtain a closed-form analytic expression y=f(x) for the motion of the dog. From (2) and (3), it follows that
.
(4)
Multiplying both sides with and taking the derivative with respect to x, using that
(5)
one gets
(6)
or
(7)
From this relation, it follows that
(8)
where B is the constant of integration determined by the initial value of y' at time zero, y' (0)= sinh(B − (Vt /Vd) lnAx), i.e.,
(9)
From (8) and (9), it follows after some computation that
.
(10)
Furthermore, since y(0)=0, it follows from (1) and (4) that
If Vt ≥ Vd, one has from (14) and (17) that , which means that the hare will never be caught, whenever the chase starts.
See also
Mice problem
References
Nahin, Paul J. (2012), Chases and Escapes: The Mathematics of Pursuit and Evasion, Princeton: Princeton University Press, ISBN 978-0-691-12514-5.
Gomes Teixera, Francisco (1909), Imprensa da universidade (ed.), Traité des Courbes Spéciales Remarquables, vol. 2, Coimbra, p. 255{{citation}}: CS1 maint: location missing publisher (link)










![{\displaystyle y'={\frac {1}{2}}\left[\left(y'(0)+{\sqrt {{y'(0)}^{2}+1}}\right)\left(1-{\frac {x}{A_{x}}}\right)^{-{\frac {V_{t}}{V_{d}}}}+\left(y'(0)-{\sqrt {{y'(0)}^{2}+1}}\right)\left(1-{\frac {x}{A_{x}}}\right)^{\frac {V_{t}}{V_{d}}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e40b8c7b635c6af40d29570b129eb5e25bf92078)

![{\displaystyle y=C-{\frac {A_{x}}{2}}\left[{\frac {\left(y'(0)+{\sqrt {{y'(0)}^{2}+1}}\right)\left(1-{\frac {x}{A_{x}}}\right)^{1-{\frac {V_{t}}{V_{d}}}}}{1-{\frac {V_{t}}{V_{d}}}}}+{\frac {\left(y'(0)-{\sqrt {{y'(0)}^{2}+1}}\right)\left(1-{\frac {x}{A_{x}}}\right)^{1+{\frac {V_{t}}{V_{d}}}}}{1+{\frac {V_{t}}{V_{d}}}}}\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a1225dec2f623dee0d52b98c5d3955c9dfc9cb58)
![{\displaystyle C={\frac {A_{x}}{2}}\left[{\frac {y'(0)+{\sqrt {{y'(0)}^{2}+1}}}{1-{\frac {V_{t}}{V_{d}}}}}+{\frac {y'(0)-{\sqrt {{y'(0)}^{2}+1}}}{1+{\frac {V_{t}}{V_{d}}}}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6fcd4025b9a701c3a7f9d52debd9548d098fb758)
![{\displaystyle y={\frac {1}{2}}\left\{{\frac {A_{y}+{\sqrt {A_{x}^{2}+A_{y}^{2}}}}{1-{\frac {V_{t}}{V_{d}}}}}\left[1-\left(1-{\frac {x}{A_{x}}}\right)^{1-{\frac {V_{t}}{V_{d}}}}\right]+{\frac {A_{y}-{\sqrt {A_{x}^{2}+A_{y}^{2}}}}{1+{\frac {V_{t}}{V_{d}}}}}\left[1-\left(1-{\frac {x}{A_{x}}}\right)^{1+{\frac {V_{t}}{V_{d}}}}\right]\right\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b20568b6a6ea5f0f49caaaf6e9dd9250ce6fd75b)
![{\displaystyle y=C-{\frac {A_{x}}{2}}\left[\left(y'(0)+{\sqrt {{y'(0)}^{2}+1}}\right)\ln \left(1-{\frac {x}{A_{x}}}\right)+{\frac {1}{2}}\left(y'(0)-{\sqrt {{y'(0)}^{2}+1}}\right)\left(1-{\frac {x}{A_{x}}}\right)^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/96499dbdab962504b0ce47cc2ecfd0c24426fc8d)

![{\displaystyle y={\frac {1}{4}}\left(A_{y}-{\sqrt {A_{x}^{2}+A_{y}^{2}}}\right)\left[1-\left(1-{\frac {x}{A_{x}}}\right)^{2}\right]-{\frac {1}{2}}\left(A_{y}+{\sqrt {A_{x}^{2}+A_{y}^{2}}}\right)\ln \left(1-{\frac {x}{A_{x}}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a7d1f4cf8d1682af8ebc5dc6098f23c76d1a10c)













